Blockwoche: "Robotik Workshop Nachhaltigkeit"
- Dozent/in: Michael Engelmann
- Dozent/in: Olaf Just
Eingebettete Systeme in der Robotik - EMR26
- Dozent/in: Michael Engelmann
- Dozent/in: Olaf Just
- Dozent/in: Olaf Just
- Dozent/in: Moses-Gereon Wullweber
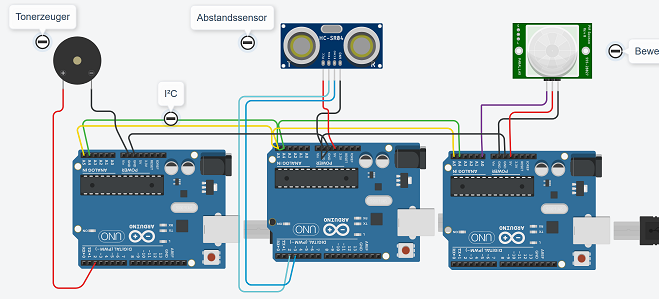
Mikrocontroller - Programmieren lernen mit Arduino Mega 2560 und C/C++ mit Focus auf mechatronischen Themen.
- Dozent/in: Michael Engelmann
- Dozent/in: Olaf Just

- Dozent/in: Olaf Just
- Dozent/in: Martin Maß
„Roboterprogrammierung mit ROS und Python“ bzw. Ruhr-TurtleBot-Competition RTC"
ROP / RTC
Pflichtmodul für Master Maschinenbau - Vertiefung Robotik
Wahlmodul für alle anderen Master-Studierenden
durchgeführt im Rahmen der Ruhr-Master-School
Westfälische Hochschule Prof. Dr.-Ing. Olaf Just, Fachhochschule Dortmund Prof. Dr.-Ing. Thomas Straßmann, Hochschule Bochum Prof. Dr.-Ing. Daniel Schilberg
- Dozent/in: Michael Engelmann
- Dozent/in: Olaf Just
Online Sprechstunde zu den Themen Anerkennung von Prüfungsleistungen, sowie Master Maschinenbau bei Prof.Dr.-Ing. O. Just vereinbaren.
- Dozent/in: Olaf Just
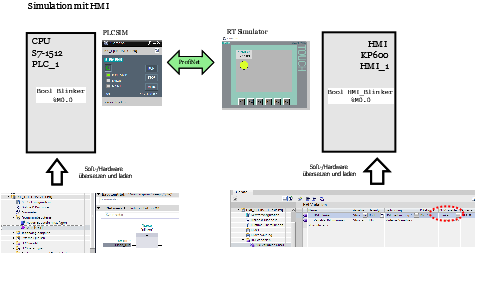
SPS und Robotik
- Dozent/in: Michael Engelmann
- Dozent/in: Olaf Just
Technische Informatik mit Python - TINpy (WS25/26)
für Bachelor Robotik und Automatisierung, Mechatronik und Maschinenbau am Campus Bocholt
- Dozent/in: Michael Engelmann
- Dozent/in: Olaf Just